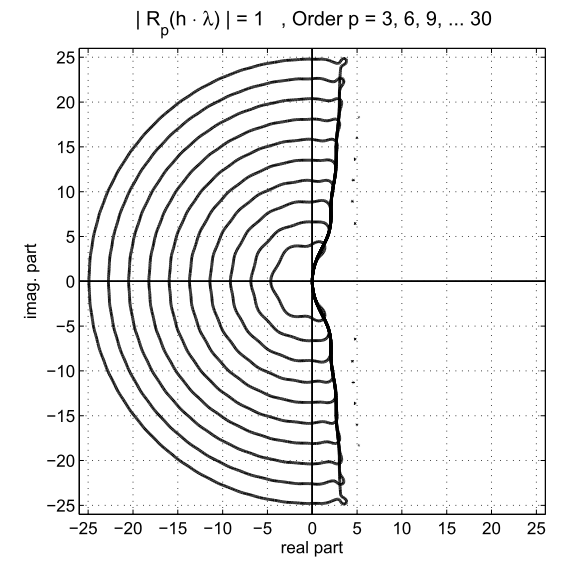
Figure 1: Stablity regions in the complex plane for the explicit
Runge-Kutta methods GB(p) for p=3 to p=30.
We go more into detail for the specific method GB(5). Fig.2 shows again in black the border of the stability region and in the background it shows in colors the magnitude of the stability function. One can observe that in the first and fouth octant there are two regions where the stability function has a value smaller than one. Consequently, the stability regions are in general not simply connected.
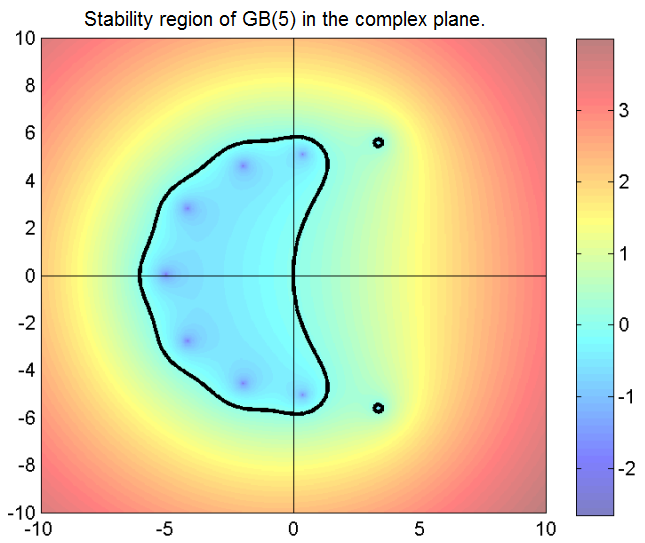
Figure 2: Stability function and stability region of the
explicit Runge-Kutta scheme GB(5) in the complex plane.
Finally we test on the Dahlquist problem { dx/dt = -1*x , x(0)=1 } whether the GB(p) methods converge of order p. Fig.3 lays out the global error of the numerical solutions at time t=1 of the GB methods compared to the analytic solution with dependence on the stepsize h. The slopes of the graphs indicate that the methods GB(p) do indeed converge at least of order p.
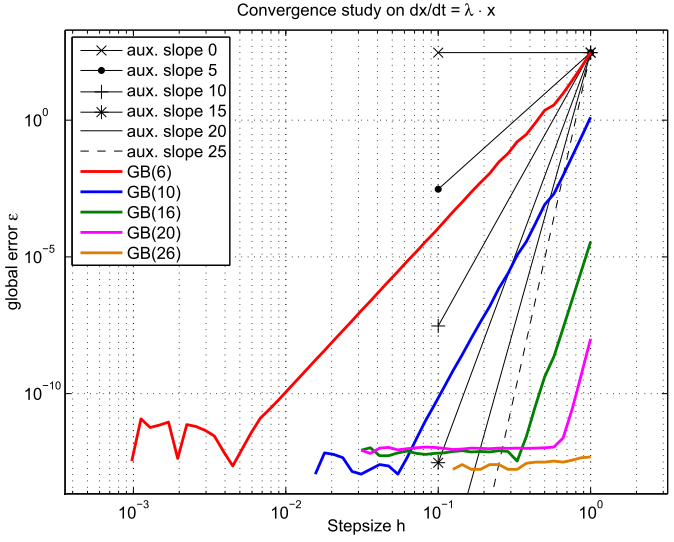
Figure 3: Convergence behaviour of several GB(p) variants
with repect to the time-step.