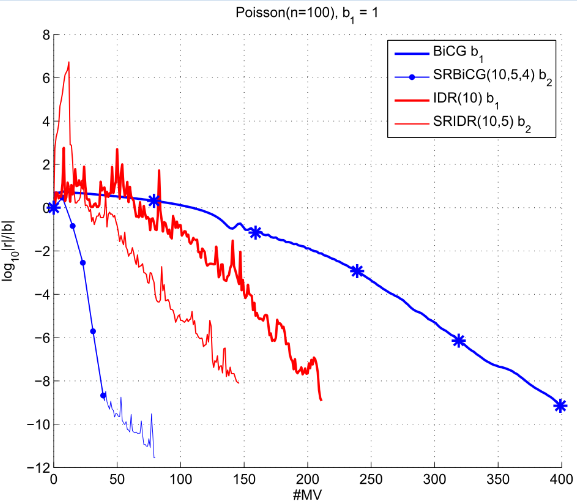
Figure 1: Exemplary convergence curves for SRIDR(10) and SRBiCG on
a 100x100 finte difference discretisation of a Poisson problem.
Fig. 1 shows the convergence behaviour
SRIDR(10) and SRBiCG for a Poisson problem. One can observe that
the recycling methods yield a faster convergence than their
predecessors IDR(10) and BiCG. The overhead due to the recycling is 6
extra DOT products for SRBiCG compared to BiCG per matrix-vector
product (#MV) during the first 40 iterations and an additional storage
for 40 column vectors of length 10000. For SRIDR(10) there is no
overhead at all, neither in computations nor in storage.